I was flying at a gravel pit pond and attempted an Orbit around a small island in the pond. The orbit started OK but at about half of the first circle, I got a "lost RC warning" and the H520 stopped. at this point, I selected RTL and the copter executed the return normally, and then I switched to angle mode when it was closer and control was back to normal. There were no obstructions between me and the copter at all. I am using a Raptor XR range extender on the ST16s. The furthest distance of the flight was only about 236m from the controller.
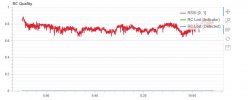
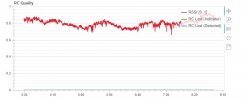
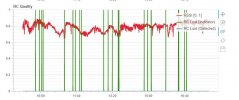
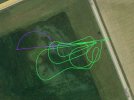
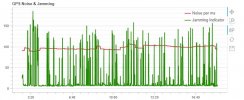
I examined the ulog file on "logs.px4.io" and will attach the file here. It showed some strange (to me) results. For instance in the "RSSI to Jamming" graph. (I assume high jamming is bad). I welcome analysis by our experts here to try to understand what happened and if it might be a problem with my ST16s with the Raptor XR. Also attaching a screen dump of the flight path - purple is Orbit and RTL.
I examined the ulog file on "logs.px4.io" and will attach the file here. It showed some strange (to me) results. For instance in the "RSSI to Jamming" graph. (I assume high jamming is bad). I welcome analysis by our experts here to try to understand what happened and if it might be a problem with my ST16s with the Raptor XR. Also attaching a screen dump of the flight path - purple is Orbit and RTL.
")