

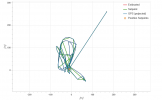
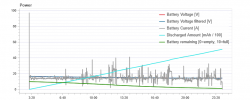
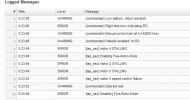
Hi members be extremely careful with low battery warnning, after that activated RTL, I lost any commands with dron. Dron flight away from my home position and position of remote control about 250 meters and crashed. Here some pictures.In safety option parameter "return to GCS" set, on altitude 35 m.
Attachments
-
 bokeh_plot 1.png46.9 KB · Views: 43
bokeh_plot 1.png46.9 KB · Views: 43 -
 bokeh_plot.png43.5 KB · Views: 37
bokeh_plot.png43.5 KB · Views: 37 -
 bokeh_plot2.png46.9 KB · Views: 35
bokeh_plot2.png46.9 KB · Views: 35 -
 bokeh_plot3.png20.2 KB · Views: 28
bokeh_plot3.png20.2 KB · Views: 28 -
 bokeh_plot4.png40.3 KB · Views: 29
bokeh_plot4.png40.3 KB · Views: 29 -
 bokeh_plot5.png57 KB · Views: 52
bokeh_plot5.png57 KB · Views: 52 -
 Screenshot_1.png1.1 MB · Views: 40
Screenshot_1.png1.1 MB · Views: 40 -
 Screenshot_2.png18.9 KB · Views: 53
Screenshot_2.png18.9 KB · Views: 53 -
 Screenshot_3.png41.6 KB · Views: 36
Screenshot_3.png41.6 KB · Views: 36

