

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Convert Typhoon H to PixHawk 6C Flight Controller
- Thread starter 1midniterider
- Start date



I misspoke... I'll blame it on tired eyes. I can replace the entire cable leading from the camera shoepad to the FC. There is nothing special about the wiring. The real question is how to connect the RX and TX/PWM wires....Why must Yuneec be so unique? Connected the landing gear module to power and it didn't fry so that is a plus. Moved on to connect power to the camera shoepad. Hold up! Wait a minute! Five wires come off the shoepad to connect to the TH mainboard but, wait... The connect to the mainboard is only a 4-wire connector. What? No biggie! I'll just reach into my box of connectors, nope! Yet another style of connector. There 1mm, 1.25mm and some other size and style. I'll sort it out, after all I did sign up for this challenge.
Bonus! I connected the TH micro usb port to the PixHawk FC. No more popping the hood to plug in. I also hardwired the MavLink wifi connectors. I needed to lower the profile in order to get the clearance to fit under the hood.
So bear with me... Full control of the gimbal requires RX/TX on a UART. PWM controls only the tilt function, correct? The latter requires a PWM init code, correct? Both methods should allow the FC to control the gimbal, correct? So my question is how does the ST16 interact with gimbal controls? Is that via WIFI?As Rx and Tx in every UART. What further...?
So, theoretically I could create a connector where the TX/PWM connects to both UART and/or PWM. Then "play" with either one. Again, bear with me... With PWM only controlling tilt, the assumption being if you need to rotate the camera then you would rotate the entire craft, correct?So bear with me... Full control of the gimbal requires RX/TX on a UART. PWM controls only the tilt function, correct? The latter requires a PWM init code, correct? Both methods should allow the FC to control the gimbal, correct? So my question is how does the ST16 interact with gimbal controls? Is that via WIFI?
You can implement a full UART communication, some aspects are shown in another thread, or use PWM only for tilt. My recommendation is to first forget about the camera and stay focused on the flying capabilities itself.
The only reason I brought it up again is that since I have it disassembled is to install the wiring for all of the components, so whenever I do get to play with the camera as well as the landing gear, I don't have to do another tear down....

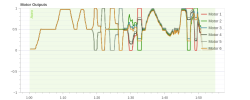
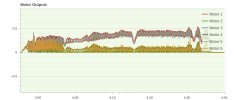
High vibration sorted out. With the shielding the radio rarely drops out now, before it was every few minutes. Also, the orientation of one of the magnetometers was incorrectly set. Performed another radio calibration and the high vibration is all but gone. Looks like it is ready for a hover test flight. The motor outputs track very well. Much better than before. Before the left and right side ESC controllers were distinctly different.
Attachments
It would seem that this modified TH is becoming a wireless communications nightmare.
1) GPS/Compass antenna
2) MavLink WiFi (Station Mode)
3) Remote ID WiFi (AP Mode)
4) CGO3+ WiFi (AP Mode)
5) RC
The Landing Gear module is powered and connected via PWM. PX4 gimbal is configured (not working) via MavLink.
The CGO3+ is powered and its gimbal is connected to the GPS2 UART and appears to working in station keeping mode. The camera is showing video. The RC is connected via DSM.
1) GPS/Compass antenna
2) MavLink WiFi (Station Mode)
3) Remote ID WiFi (AP Mode)
4) CGO3+ WiFi (AP Mode)
5) RC
The Landing Gear module is powered and connected via PWM. PX4 gimbal is configured (not working) via MavLink.
The CGO3+ is powered and its gimbal is connected to the GPS2 UART and appears to working in station keeping mode. The camera is showing video. The RC is connected via DSM.
Last edited:
Is it possible to have the CGO3+ and MavLink run on the same WiFi network? It would sure make things easier. I have QGC on one a different WiFi network than the CGO3+, which makes streaming video to the QGC impossible without installing a second WiFi radio.
h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,401
- Reaction score
- 2,164
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com
I don't believe that CGO3+ will act as MAV bridge as the newer cameras like C23 or C90 do.
I don't know if QGC can play RTSP video stream from another IP address than the telemetry one.
I don't know if QGC can play RTSP video stream from another IP address than the telemetry one.
Can the IP Address be changed for the CGO3+, is what I meant? If so, it would allow both MavLink and CGO3+ to run on same network, not same WiFi device.I don't believe that CGO3+ will act as MAV bridge as the newer cameras like C23 or C90 do.
I don't know if QGC can play RTSP video stream from another IP address than the telemetry one.

h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,401
- Reaction score
- 2,164
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com
No, the WiFi access point of the CGO3 has a fix IP address: 192.168.42.1
It runs a DHCP server and gives IP addresses to other clients in subnet 192.168.42.*
Media files: http://192.168.42.1/DCIM/100MEDIA/
Video live stream: rtsp://192.168.42.1/live
It runs a DHCP server and gives IP addresses to other clients in subnet 192.168.42.*
Media files: http://192.168.42.1/DCIM/100MEDIA/
Video live stream: rtsp://192.168.42.1/live
Yeah, I was hoping for a different answer.... Looks like I will need a second WiFi in the QGC station... In order to stream the video...
A new ESC will be here this week and then I'll be able to test fly it... I accidentally fried one...
Attempted a test flight today... It ended with a crash. My computer appeared possessed. Screens scrolling... Pop ups appearing... It was just weird... Seems to have happened only when I had QGC running. Something to look into. I had to switch motor control to PWM on the Main IO ports, it appears that i have a bad AUX channel on the FC that supports DShot. The strangest thing is that PX4 on supports DShot on AUX channels 1-6. Hence the move to PWM on the main ports. Nothing else of note today.
Working on using an ESP32 micro-controller to handle the SR24, CGO3+ and landing gear communications. The ESP32 will convert the SR24 to an SBUS FC.
Working on using an ESP32 micro-controller to handle the SR24, CGO3+ and landing gear communications. The ESP32 will convert the SR24 to an SBUS FC.