

I had my first crash this weekend 
I'd done some poking around with the ST16S logs in Drone Logbook but nothing serious but now it was forensic data. Friday, I was attempting to test DataPilot waypoint programming when something went very wrong in a trial flight! I had done a trial just before the crash that went pretty good ...
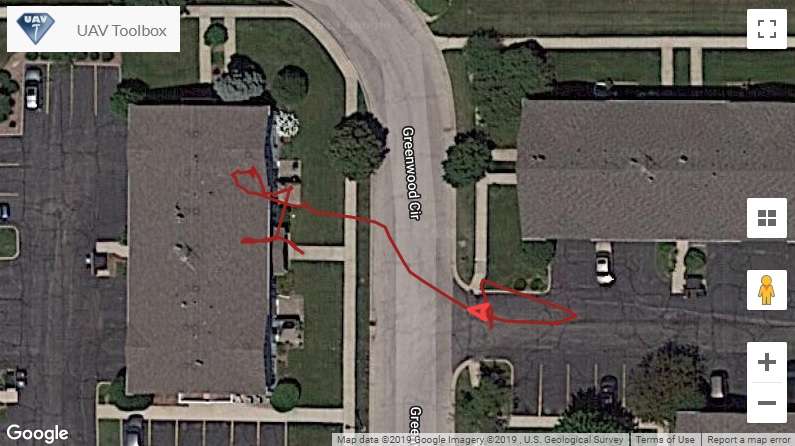
but it got TOO LOW I redid the waypoints in DataPilot to look like this ...

and this is what happened ...

BTW - I was not very impressed with UAV Toolbox's version of the flight plan Whyyyy would it be so different ???
I was very lucky in it seems that there was only some minor damage to the gimbel that i was able to have repaired at a local camera repair shop and it scratched up 1 blade moderately and another slightly. I spent the rest of the weekend learning everything I could about Yuneec drone logs and put together this simple mindmap to sort it all out. It's not finished but it's a start")
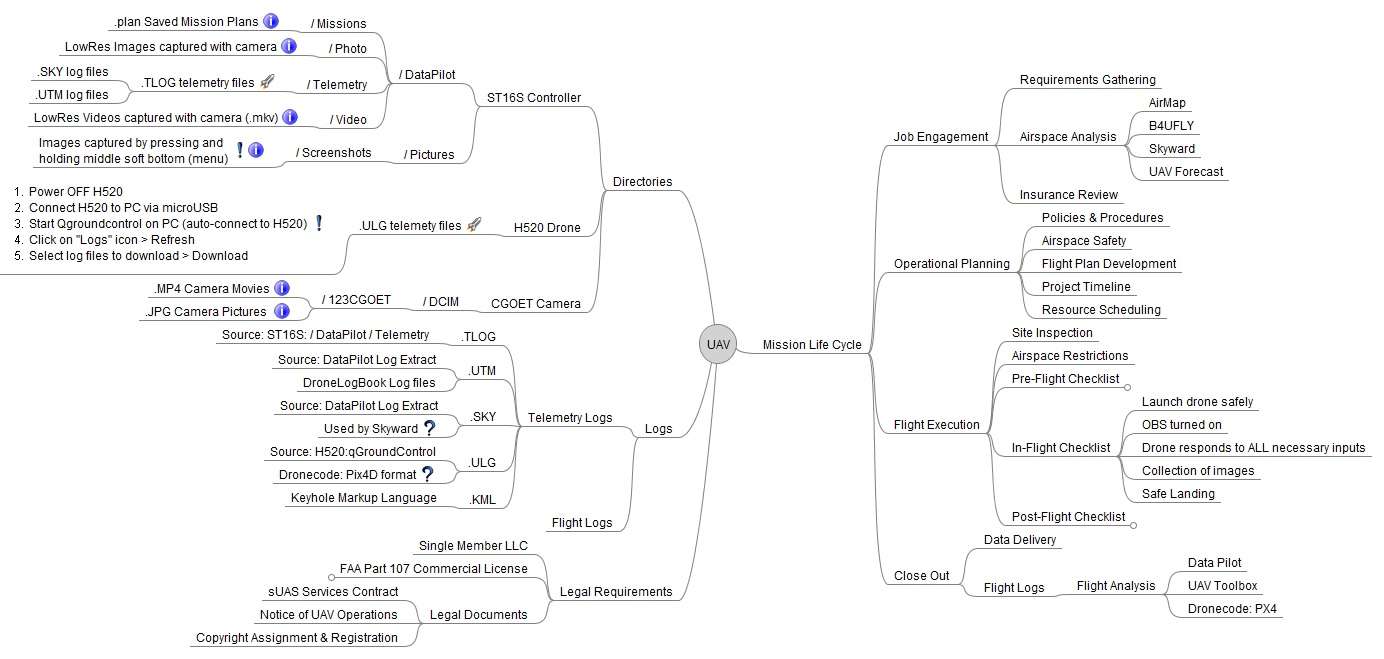
I found references to a /FlightLog set of directories but I never ran across anything like that and am guessing that is for other Yuneec models. I did review a lot of software tools available including:
I'd done some poking around with the ST16S logs in Drone Logbook but nothing serious but now it was forensic data. Friday, I was attempting to test DataPilot waypoint programming when something went very wrong in a trial flight! I had done a trial just before the crash that went pretty good ...
but it got TOO LOW
I redid the waypoints in DataPilot to look like this ...and this is what happened ...
BTW - I was not very impressed with UAV Toolbox's version of the flight plan
Whyyyy would it be so different ???
I was very lucky in it seems that there was only some minor damage to the gimbel that i was able to have repaired at a local camera repair shop and it scratched up 1 blade moderately and another slightly. I spent the rest of the weekend learning everything I could about Yuneec drone logs and put together this simple mindmap to sort it all out. It's not finished but it's a start
I found references to a /FlightLog set of directories but I never ran across anything like that and am guessing that is for other Yuneec models. I did review a lot of software tools available including:
- Q500log2klm - a lot of features but not integrated well for H520 yet: no Overview, no Profiles, no Data Analysis
- Dashware - nice interface but couldn't get it to work with H520 logs yet
- UAV Toolbox - lots of features but not well integrated for H520 yet - Crash Analysis Sample
- DroneDeploy - more an enterprise level operations tool
- DroneLogbook - all the basics, I can see why its part of the standard lineup ... just not enough detail
- Skyward - real nice suite of features that scales up for larger drone operations with LAANC
- Qgroundcontrol - Part of the open-source Dronecode Project for PX4 and MavLink
- Dronebase - More a global management option
- PX4 - An open source solution that seems very robust - Crash Analysis Sample
- It seems the H520 is truly based on the Dronecode Pix4D, Mavlink, etc. platform?
- What are the non-DroneLogbook .ULM telemetry files used by?
- Does running 3rd party software like UAV Toolkit on the ST16S cause problems or void warranties?
- What does Velocity do for Gimble Tilt Mode (S1) other than 20-degree up-angle on the camera tilt ?
- What is the difference between the RTL Flight Mode (S4) and the RTL soft button on the Fly Menu in Datapilot?
- What does the 'Log Download' do in the PC Data Pilot Planner (Y) menu?
- Where should I be looking to triage the crash event?

")