- Joined
- Jun 13, 2016
- Messages
- 27
- Reaction score
- 8
- Age
- 73
Wilco.......but I may not have time to perform this procedure until the weekend. Working lots of OT.Perhaps. But it would be better to establish a good baseline before going into calibration. It would be good if you run this sequence and upload the resulting new set of information.
1.) Remove the props.
2.) Start the ST16.
3.) Start the TH.
4.) Wait for bind.
5.) Start the motors (but do not increase throttle with motors running)
6.) Stop the motors
7.) Cycle all control devices at least once.
8.) Shutdown the drone.
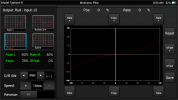
9.) Get a Screenshot of the Yaw (Rudder) EXPO page. Refer to the attached document.
10.) Shutdown the ST16
11.) Restart the ST16.
12.) Upload the new flight log and screenshot for review.
One other question.....When providing the initial flight log, I had issues with getting the ST16 to recognize my SD card. I would see the prompt on the screen that it had been inserted or removed, but it never showed up as a volume I could write to. The card is formatted as exFAT, so perhaps the ST16 is looking for FAT32 formatting? Do I need to format the card with the ST16?
Thanks!