

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Typhoon H 480 PX4 v1.10 (Stability issues ;-)
- Thread starter Pöllö
- Start date
-
- Tags
- programming px4

- Joined
- Jan 20, 2019
- Messages
- 184
- Reaction score
- 149
- Age
- 42
While the Thunderbird is as easy yet more comfortable to fly than the stock typhoon, it opens a whole new world of possibilities for aggressive/dynamic flying and automated missions. And with those, crashes may happen every now and then. As Yuneec's supply of spare parts and spare drones is what it is, this has kept me busy for the last week or so... ;-)


h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,703
- Reaction score
- 2,575
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com


- Joined
- Jan 20, 2019
- Messages
- 184
- Reaction score
- 149
- Age
- 42
The LEDs are driven by the ESCs of the drone and they can be toggled if required. However at the moment, the ESC driver is using almost its full allocated memory, and that being one of the most critical components of the system, capable of spectacular malfunctions, I'm going to leave them just on for a while. The ESC driver "application" should be modified to communicate over uORB "communication bus" to ST24/RC input "application" for the light switch to work. Not a big deal, but as we're running close to memory limits, I'll leave it for now as it is. Also any modifications done to that driver/part of the PX4, are such that require a lot of testing before I can dare to release it...Discover the ON/OFF LED sequence will be useful too.
")
Another interesting feature of the "TAPESC" driver, is the capability to reverse the running direction in software. That may (will!) find some use, after I've completed the printable model of the Thunderbird (with some TH compatible parts). I may take another look at the LEDs also then.
Last edited:
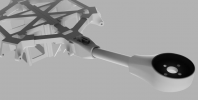
Awesome work and I have in mind to implement it on my drone. If you need any parts for testing let me know. I have a few FC's and other parts like mainboards and so on. I want to help to see a finished product. Do you know this can be implemented on the H plus or do they use a different processor? Also on this Thunderbird can I use different motors? I have in mind a project to build a hexacopter to be used with my insta 360 one R and to use the hardware from a typhoon H or H plus. I build the one in the picture and I use Inav on it but it is not that stable as I want to be. I tried on a different build to port the board from an H plus I got it to work but the motors I use (the same one as in the picture) won't spin. That was an embarrassment for me because I decided to build everything without testing first ") ))
))
))Attachments


A and B motors have different inclinations. How do you measure the angle and what is the value to not measure it here too?
- Joined
- Jan 20, 2019
- Messages
- 184
- Reaction score
- 149
- Age
- 42
Few degrees.A and B motors have different inclinations. How do you measure the angle and what is the value to not measure it here too?
 I'm going to make a some kind of printable assembly jig for them. It's not that precise, the inclination is there to provide some yaw authority, that makes the Typhoon/TB so enjoyable to fly. Another drones with inclined motors (that I know/have flown) were DJI's S1000 airframes, that were very similar to TBird to fly (very sweet) although their overall mfg quality was pretty poor. Hexacopter or octo without inclined motors is much more sluggish and inprecise in yaw, despite of flight controller tuning.
I'm going to make a some kind of printable assembly jig for them. It's not that precise, the inclination is there to provide some yaw authority, that makes the Typhoon/TB so enjoyable to fly. Another drones with inclined motors (that I know/have flown) were DJI's S1000 airframes, that were very similar to TBird to fly (very sweet) although their overall mfg quality was pretty poor. Hexacopter or octo without inclined motors is much more sluggish and inprecise in yaw, despite of flight controller tuning.
h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,703
- Reaction score
- 2,575
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com
Discover the ON/OFF LED sequence will be useful too.
55 | 55 | 04 (len) | 14 (msg type) | 09 (comp ID) | 00 | EC (CRC) |
55 | 55 | 04 | 14 | 09 | 01 | EB |
I think 01 is off but I'm not sure.
To change the home altitude ST16 sends also message type 20 but with lenght 7. Examples:
55 | 55 | 07 | 14 | 0B | 14 | 1E | 71 | 78 | FF |
55 | 55 | 07 | 14 | 0B | AC | 26 | 71 | 78 | 67 |
55 | 55 | 07 | 14 | 0B | AC | 26 | 70 | 78 | 72 |
55 | 55 | 07 | 14 | 0B | A0 | 28 | 71 | 78 | A3 |
55 | 55 | 07 | 14 | 0B | 20 | 1C | 72 | 78 | E7 |
br HE

Hi fellas and a marry Christmas to all.
First of all, i read nearly the whole Thread, congrats to Pöllö and h- elsner for your Work. It appears a great solution, and it could be perfet fit for my needs.
I found this thread while searching for an simple integrated solution for Fawn saving before Mowing.
It becomes this year a thing of heart for me.
I have absolutely no commercial interests, it is just to save the fawns.
I fly several years with highspeed drones and fpv Setup but just for fun and racing purposes and in short distances and with very short Airtimes ( 5-9 min) my Top Racer lifts up with 180 km/h and is able for a topspeed of 230 km/h.
But however, For this fawn save issue i need instead a long flight Thermal drone and i like the idea of integration from the ST10+ from yuneec with the Little Android display as a all in one solution.so that i have just one piece of steering system on the field.
My goal is to fly autonom a field 800m wide( long range) with a 400*300 picel highres highframe Thermal camera and link the Video from the Copter to the Ground station.
Firstly i experimented with a 1,2Kilo heavy Airborne with an DJI hexa Airframe. But i found it is too heavy for long flights.
At least i printed a ultralightweight foldable Copter for an Omnibus F4 SD, what i read somwhere here, is the base of the Development.
I catched a cheapo St10+ and st24 Wifi module, but i have no datasheets until now how to interconnect the yuneec Radio to the Omnibus F4 pro.
It appears to be a nice easy and lightweight solution for an all in one longflight copter.
Shortly before i try to solve it via an Flysky TX and via QGCS on my ipad and an Wemos esp32 as telemetry system, what works so far, but just with an extremly short range. I adapted an external Antenna to increase the range but i stuck with the Video transmission, thats the reason for my idea to change it over to a ST10+ Where all is included.
So i found another deal with a cheap gimbal mk58 combo, that shall solve my needs and also working with the ST10+ together.
For range Extending i work with different directional Antenna Systems from helical to Planar Antennas.
Any help in interconnecting an Omnibus f4pro and yuneec ST24 receiver is highly appreciated.
QGCS as configure system is also highly welcome.
For my solution i need following:
1. connection pinout from yuneec sR24 wifi module to omnibus f4 pro flight controller, as far as i believe find out the Thunderstorm firmware should work( i hope)
2. the ability to fly 20-30 waypoints autonom in a range 300-400 meters with a failsave RTL.
3. the thermalcam videolink ( where the mk58 is on it‘s way.
I know this is not a finally solution, but it‘s far enough to hang in and help complete it.
Thanks a lot for you help Gentleman.
First of all, i read nearly the whole Thread, congrats to Pöllö and h- elsner for your Work. It appears a great solution, and it could be perfet fit for my needs.
I found this thread while searching for an simple integrated solution for Fawn saving before Mowing.
It becomes this year a thing of heart for me.
I have absolutely no commercial interests, it is just to save the fawns.
I fly several years with highspeed drones and fpv Setup but just for fun and racing purposes and in short distances and with very short Airtimes ( 5-9 min) my Top Racer lifts up with 180 km/h and is able for a topspeed of 230 km/h.
But however, For this fawn save issue i need instead a long flight Thermal drone and i like the idea of integration from the ST10+ from yuneec with the Little Android display as a all in one solution.so that i have just one piece of steering system on the field.
My goal is to fly autonom a field 800m wide( long range) with a 400*300 picel highres highframe Thermal camera and link the Video from the Copter to the Ground station.
Firstly i experimented with a 1,2Kilo heavy Airborne with an DJI hexa Airframe. But i found it is too heavy for long flights.
At least i printed a ultralightweight foldable Copter for an Omnibus F4 SD, what i read somwhere here, is the base of the Development.
I catched a cheapo St10+ and st24 Wifi module, but i have no datasheets until now how to interconnect the yuneec Radio to the Omnibus F4 pro.
It appears to be a nice easy and lightweight solution for an all in one longflight copter.
Shortly before i try to solve it via an Flysky TX and via QGCS on my ipad and an Wemos esp32 as telemetry system, what works so far, but just with an extremly short range. I adapted an external Antenna to increase the range but i stuck with the Video transmission, thats the reason for my idea to change it over to a ST10+ Where all is included.
So i found another deal with a cheap gimbal mk58 combo, that shall solve my needs and also working with the ST10+ together.
For range Extending i work with different directional Antenna Systems from helical to Planar Antennas.
Any help in interconnecting an Omnibus f4pro and yuneec ST24 receiver is highly appreciated.
QGCS as configure system is also highly welcome.
For my solution i need following:
1. connection pinout from yuneec sR24 wifi module to omnibus f4 pro flight controller, as far as i believe find out the Thunderstorm firmware should work( i hope)
2. the ability to fly 20-30 waypoints autonom in a range 300-400 meters with a failsave RTL.
3. the thermalcam videolink ( where the mk58 is on it‘s way.
I know this is not a finally solution, but it‘s far enough to hang in and help complete it.
Thanks a lot for you help Gentleman.
Attachments




h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,703
- Reaction score
- 2,575
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com
I don't believe that you can use the Thunderbird FW tolet it run on F4 SD. It was built for the specific Yuneec Typhoon H hardware based on PX4 Autopilot.
You need to compile a special PX4 Autopilot for F4SD that has added the SR24 part which is available for PX4 SW. I see one problem whith this setup: ST10 will report motor erros and maybe other errors when it will not get expected telemetry data. This is something that needs to emulated by a special part of the firmware.
Video transmitting with MK58 will work ou of the box with ST10 without additional effort.
Here are the pins for SR24 UART:


There are two version: An older one from Q500 and a newer used in Typhoon H. The behaviour of both is the same.
Attached the data format on the SR24 UART.
Greetings from Bavaria ;-), HE
You need to compile a special PX4 Autopilot for F4SD that has added the SR24 part which is available for PX4 SW. I see one problem whith this setup: ST10 will report motor erros and maybe other errors when it will not get expected telemetry data. This is something that needs to emulated by a special part of the firmware.
Video transmitting with MK58 will work ou of the box with ST10 without additional effort.
Here are the pins for SR24 UART:
There are two version: An older one from Q500 and a newer used in Typhoon H. The behaviour of both is the same.
Attached the data format on the SR24 UART.
Greetings from Bavaria ;-), HE
Attachments
Hi,
Thanks for the info‘s so far.
I do lot‘s of searchings bu i didn‘t find any confirms.
As i found so far compared to your „Wifi Module“ my Wifi module, mine should be connected like
Red is 3,3V power
Black is GND
Blue appears to be TX
White shall be RX ( telemetry and bind sequence)
And it is out of an Q500 4K Setup.
The ST10+ Groundstation was a brand new spare version.
I don’t know if the rx and tx ports are 5V tolerant i don’t wanna fry the wifimodule, so i think i use a 3,3V interface. Any errors they could appear doesn‘t Shock me, as long as it fly‘s without a immediately crash.
I was lurking for a cheap crashed drone to get the inside parts, but i have so much small drones flight parts here, i will try to bring it in the Air.
I just love the most the solution of the Groundstation with its integrated display for the Camera.
Greeting back from Bavaria to all.
Thanks for the info‘s so far.
I do lot‘s of searchings bu i didn‘t find any confirms.
As i found so far compared to your „Wifi Module“ my Wifi module, mine should be connected like
Red is 3,3V power
Black is GND
Blue appears to be TX
White shall be RX ( telemetry and bind sequence)
And it is out of an Q500 4K Setup.
The ST10+ Groundstation was a brand new spare version.
I don’t know if the rx and tx ports are 5V tolerant i don’t wanna fry the wifimodule, so i think i use a 3,3V interface. Any errors they could appear doesn‘t Shock me, as long as it fly‘s without a immediately crash.
I was lurking for a cheap crashed drone to get the inside parts, but i have so much small drones flight parts here, i will try to bring it in the Air.
I just love the most the solution of the Groundstation with its integrated display for the Camera.
Greeting back from Bavaria to all.
Attachments

h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,703
- Reaction score
- 2,575
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com
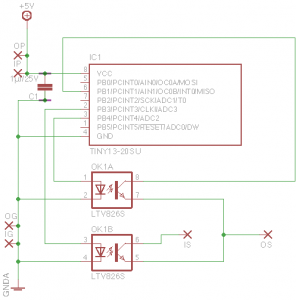
Yes, there is a whole collection of color coding.

Btw, this is not WiFi, it's ZigBee. The core is a CC2530. The datasheet says, supply power max is 3.9V. But I would not try this. The module should be powered by 3.3V. The digital pins are also limited to max 3.9V but should never higher than the supply voltage.
br HE
Btw, this is not WiFi, it's ZigBee. The core is a CC2530. The datasheet says, supply power max is 3.9V. But I would not try this. The module should be powered by 3.3V. The digital pins are also limited to max 3.9V but should never higher than the supply voltage.
br HE
Hello, Do you konw the ESC's PWM protocol. Now I want to use a H920's ESC to DIY.So here it goes what I found saved on my computer about Yuneec protocols.
(well... the growing PWM ramp actually doesn't exist - I'm getting older)
Probably you found them already, but just in case...
Gimbal signaling :
Horizon CGO2 mit Standard Empfänger schwenken. - Sonstige Tutorials - Tutorials
Die CGO2 lässt sich nicht von einem normalen Empfänger ansteuern der ein Signal im Bereich 1000us - 2000us sendet.Hier eine kleine Selbstbaulösung.www.kopterforum.de
Using CGO2 with standard PWM receiver - Page 3 - RC Groups
Page 3-Mini-HowTo Using CGO2 with standard PWM receiver R/C Blogswww.rcgroups.com
SR24 zigbee protocol, files attached (only for Q500 and without telemetry ...):
Typhoon H / ST-16 controller : Can it be re-purposed?
Just trying to understand some of this post ( way out of my league) what I am trying to find out if I could put a Yuneec flight controller in a 550s frame and run it with the ST16 ???? I think there is a little more to it than that. I'm pretty sure that in addition to the the yuneec flight...yuneecpilots.com
I played a little with the Typhoon H motherboard with stock firmware and I managed to lift it in the air (sort of...) with custom arms and custom motors+props, but due to the inability to tune it I gave it up for the moment.
Initially I wanted to port it to INAV, but my coding skills are close to zero, so even if I able to do the port definitions, I can't compile it (beeing an electrical engineer). Anyhow, INAV doesn't compare to AP/PX4, at least for cinematographic platforms...
Once I wanted to do it to the Phantom3 (having a F427, it would be a good pretender to AP or PX4)
As a side-note, I found a creepy similarity between the CGO3 and CGO3+ gimbal controllers' hardware and the 32bit version of AlexMos boards
Keep us tuned and best regards,
Zsolt
Edit:
The big hexa is using the stock ESC board? I checked it's power capability and concluded that they are waaay oversized, but no way till 3508-sized motors on 15"
I tested it initially with 2216-810kV on Phantom2 props (9,5"x4,5") but wanted to upgrade to 10"x5" or 11"x5" props, still on the safe side IMHO...
h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,703
- Reaction score
- 2,575
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com
A new Thunderbird was born yesterday, located in south of Germany. Can't wait to hear from maiden flight. Let's see...
Br HE
Br HE
h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,703
- Reaction score
- 2,575
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com
Doing some tests and updates in docu I found out that Rattitude Mode is no longer visible in QGroundControl.
It also disappeared from Flight Mode descriptions for Multicopter here: Flight Modes | PX4 User Guide
Loading my old parameter settings the flight mode Rattitude is displayed as "Unknown9".
Does it mean that rattitude will no more available in newer builds of PX4 Autopilot? This would be very sad. I like this mode because it gives me the possibility to fly Acro with lower risk. For pure Acro I feel to be too old ;-).
Edit: And this is the solution:

The flight mode names are represented as numbers in the parameters (enum). Rattitude is still number 9.
Go to Vehicle Setup > Parameter and select parameter set "Commander". There are parameter COM_FLTMODEx for six slots [x = 1 ... 6] . You see what was already assigned. Select the slot you want to change (for above explained set this is COM_FLTMODE5) and check "Advanced Settings" and "Manual Entry". Enter "9" for Rattitude, save and done.
br HE
Last edited:
h-elsner
Premium Pilot
- Joined
- Mar 23, 2016
- Messages
- 2,703
- Reaction score
- 2,575
- Location
- Bavaria / Germany
- Website
- h-elsner.mooo.com
Updated documentation for flight mode settings:

 github.com
github.com
br HE
Thunderbird/Documentation at Typhoon_H_480 · h-elsner/Thunderbird
Thunderbird Firmware, A fork of PX4 Autopilot Software for Yuneec Typhoon H - h-elsner/Thunderbird
github.com
br HE
Last edited:

This hybrid was completed today and tested. The firmware is an original 480'er. Fly but is not stable in the air, what was expected. Idea is to flash it with Thunderbird firmware.
About flashing itself I have a pdf from @h-elsner. Where to read how to tune it after flashing?
Similar threads
- Replies
- 12
- Views
- 922
- Replies
- 5
- Views
- 581
- Replies
- 8
- Views
- 241
- Replies
- 6
- Views
- 944
- Replies
- 168
- Views
- 23K
