

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Typhoon H GPS Specifications
- Thread starter gwhuntoon
- Start date
- Status
- Not open for further replies.
John Hennessy
Premium Pilot
- Joined
- Jun 26, 2017
- Messages
- 421
- Reaction score
- 351
- Age
- 69

John Hennessy
Premium Pilot
- Joined
- Jun 26, 2017
- Messages
- 421
- Reaction score
- 351
- Age
- 69
You can borrow some of ours if you run out, good night and good luck. Johnno Hennessy Keep flying on the green side of the grass.
Hello everyone, ¡have a nice new year´s eve guys!
Please, consider that it is holidays time and I am not in house or laboratory")
A little retrospective is needed here:
I am 29 years old and since 1998 my hobby was model airplanes: aircrafts, helicopter, turbines... since 2004 to these days that it changed to RPAs (drones). Firstly with planes but soon with multirotors. I lived very close the early DIY drones days: ardupilot first steps with Jordi Muñoz and company, Microkopter, Multi-Wii and how Wang founded DJI. All of commercial middle grade drones makers of today comes from those days. First 3DR and DJI, then Parrot, Yuneec, Jamara, Walkera... All are using the bases that DIY community developes. Many of us have spent years developing with others and then seeing how industrie takes ideas and make money. Of course this is normal. This post is no a revenge with them. Industry move along proffesional demands. I was in the early meetings with Spanish goverment for evaluate the "drone revolution" and saw how is neccesary some rules for obvious security reasons.
Why wait for a new model with RTK GNSS support or pay 40000$ for a MicroDrones? Because it have thousands hours of test and it complies with the new laws that, at least in Spain, regulate all professional operations and work with drones.
So a friend of mine and I thought...hey! how many effort can take us to bring semi professional grade drones into the next level? It is just a matter of laws? No problem, spent some money, get official pilot license, spent thousands hours in get an AESA autorization to be able with professional drones operations in the I+D field (Investigation and developing) and then selects a commercial drone maker than can provide an affordable professional product. Thats what we did. We select Yuneec mainly because in my University test platform, a Q500, I detected years ago some accesible Mavlink traces in source code (Mavlink is an Open Source communication protocol). I told me: Mavlink? Okay Dario, pull the thread and look to see what you find.
When Yuneec released Typhoon H, heaven opens to me: Six rotors, semi-professional grade quality, commercial product that can be insured and autorized by AESA and the best, probably based in a PX4 flight control stack. I founded a non-profit RPA laboratory and with donations I bought in 2016 a Typhoon H.
So here we go!")
The problem is that Yuneec is going into the same commercial strategy than others: latest products are in continuous developing intensively some months and then they stop their support. Is the today industrie´s canon. The problem is that new products not represent great changes and continues without accomplish professional high grade necesities. New H520 is like 2013 Pixhawk based drones but five years later. DataPilot software is same as Mission Planner or QGroundControl and his best product, H920 do not have capacity to use others plug and play payloads.
@Victory Pete: Ceased production not means stopping customers support or spare parts avalability. Yuneec has stopped the develope of new hardware for Typhoon H some months ago. They have some greats improvements forgot in their servers but I don´t know if they will realease them (new cameras integration). With some small changes they would convert Typhoon H into H520. But... they have already a product called H520. How I know this? Internet is very big and if you know where to see, you find a lot of information I do not pretend to be rude or pretentious, it is just a matter of restricted information rights. Thanks for understanding.
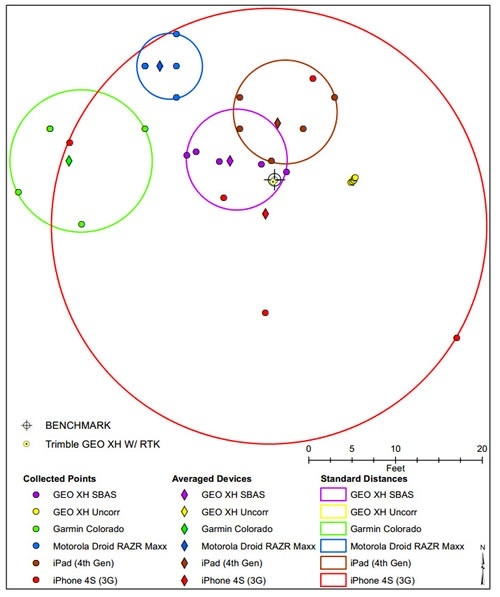
@Rubik and for all interested: When we talk about accuracy in GNSS systems we must to difference between 2D and 3D positioning. Accuracy refers to the degree of closeness the indicated readings are to the actual position. In 3D positioning, there are position vectors that move over reference geoespatial axles. 2.5cm accuracy means that these 3D vectors has a maximun displacement over a reference axle of 2.5cm.
Pay attention: imagine an sphere that has a radious of 2.5cm and it moves in the space, your real position (coordinates and altitude) could be anything point contained into the sphere but your reported GNSS position (coordinates and altitude) always will be the center of the sphere, i.e, the position gived by your GNSS module to your drone flight control board.
Some examples of accuracy (in a 2D view):
@John Hennessy: For now I have implemented this system in five Typhoon H. Main problem is find magnetomoter chips as they are not in stock.
For all:
If you are interested in seeing some flights with this, here you have two flights from 12/30/2017 (yesterday):
First, 078.csv, is using RTK support and was part of a survey mission that I made for a friend.
Second, 079.csv, was a video shooting in same location like before and is not using RTK support.
This Typhoon H unit, the first I bought, has our early ceramic patch antenna design. Currently we are using high grade helical antennas.
As you can see in both .csv files, last column reports GNSS accuracy. Compare both files. After about a minute since press power button, on first flight (with RTK support) accuracy drops below 0.15meters (15cm) and after 3 minutes it achieves 0.05 meters (5cm). This accuracy is the lowest reported by telemetry but this is not maximun accuracy value. As you can see in files, Yuneec telemetry reports GNSS accuracy in blocks of 5cm, for example, from 0.15m drops to 0.10m, then to 0.05m. When I explore raw data extracted from a datalogger attached to the GNSS chip I see the 2.5cm (while yuneec shows in same timestamp 0.05m).
On second flight, without RTK support, accuracy value moves between 1.5 and 1.0 meters.
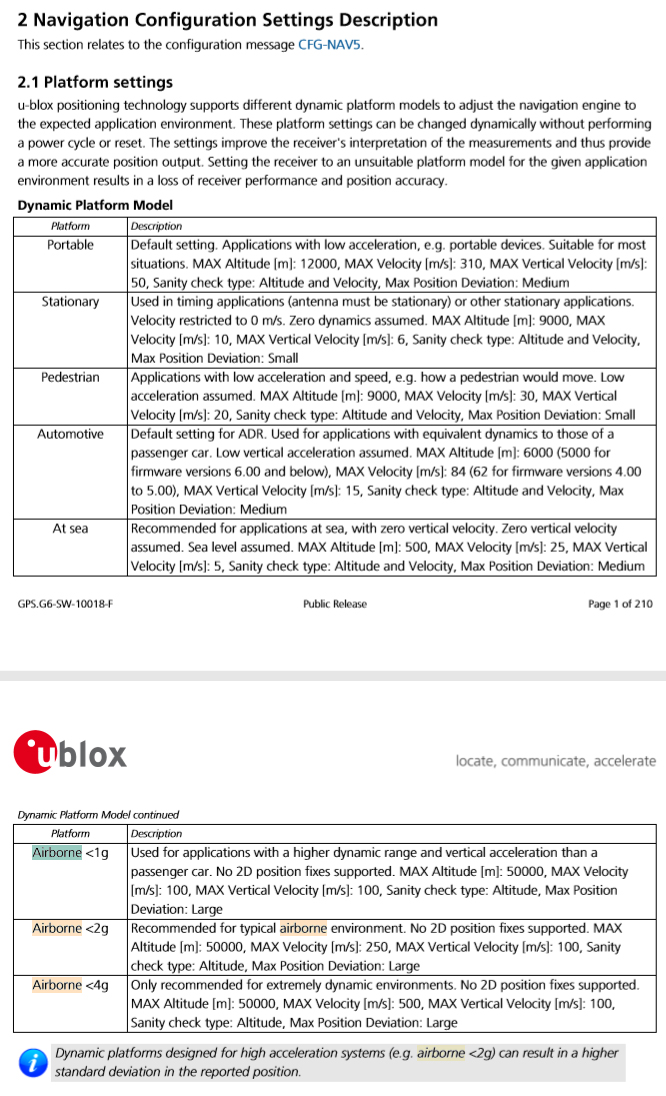
Original GNSS chip used by Yuneec reports false accuracy values in telemetry because Yuneec has configured it with Airborne Ublox algorithm activated. This is an error. We use pedestrian configuration for lower interpolation in position calcs:
Wish you happy new year!
Regards from Spain,
Dario.
Please, consider that it is holidays time and I am not in house or laboratory
A little retrospective is needed here:
I am 29 years old and since 1998 my hobby was model airplanes: aircrafts, helicopter, turbines... since 2004 to these days that it changed to RPAs (drones). Firstly with planes but soon with multirotors. I lived very close the early DIY drones days: ardupilot first steps with Jordi Muñoz and company, Microkopter, Multi-Wii and how Wang founded DJI. All of commercial middle grade drones makers of today comes from those days. First 3DR and DJI, then Parrot, Yuneec, Jamara, Walkera... All are using the bases that DIY community developes. Many of us have spent years developing with others and then seeing how industrie takes ideas and make money. Of course this is normal. This post is no a revenge with them. Industry move along proffesional demands. I was in the early meetings with Spanish goverment for evaluate the "drone revolution" and saw how is neccesary some rules for obvious security reasons.
Why wait for a new model with RTK GNSS support or pay 40000$ for a MicroDrones? Because it have thousands hours of test and it complies with the new laws that, at least in Spain, regulate all professional operations and work with drones.
So a friend of mine and I thought...hey! how many effort can take us to bring semi professional grade drones into the next level? It is just a matter of laws? No problem, spent some money, get official pilot license, spent thousands hours in get an AESA autorization to be able with professional drones operations in the I+D field (Investigation and developing) and then selects a commercial drone maker than can provide an affordable professional product. Thats what we did. We select Yuneec mainly because in my University test platform, a Q500, I detected years ago some accesible Mavlink traces in source code (Mavlink is an Open Source communication protocol). I told me: Mavlink? Okay Dario, pull the thread and look to see what you find.
When Yuneec released Typhoon H, heaven opens to me: Six rotors, semi-professional grade quality, commercial product that can be insured and autorized by AESA and the best, probably based in a PX4 flight control stack. I founded a non-profit RPA laboratory and with donations I bought in 2016 a Typhoon H.
So here we go!
The problem is that Yuneec is going into the same commercial strategy than others: latest products are in continuous developing intensively some months and then they stop their support. Is the today industrie´s canon. The problem is that new products not represent great changes and continues without accomplish professional high grade necesities. New H520 is like 2013 Pixhawk based drones but five years later. DataPilot software is same as Mission Planner or QGroundControl and his best product, H920 do not have capacity to use others plug and play payloads.
@Victory Pete: Ceased production not means stopping customers support or spare parts avalability. Yuneec has stopped the develope of new hardware for Typhoon H some months ago. They have some greats improvements forgot in their servers but I don´t know if they will realease them (new cameras integration). With some small changes they would convert Typhoon H into H520. But... they have already a product called H520. How I know this? Internet is very big and if you know where to see, you find a lot of information
I do not pretend to be rude or pretentious, it is just a matter of restricted information rights. Thanks for understanding.@Rubik and for all interested: When we talk about accuracy in GNSS systems we must to difference between 2D and 3D positioning. Accuracy refers to the degree of closeness the indicated readings are to the actual position. In 3D positioning, there are position vectors that move over reference geoespatial axles. 2.5cm accuracy means that these 3D vectors has a maximun displacement over a reference axle of 2.5cm.
Pay attention: imagine an sphere that has a radious of 2.5cm and it moves in the space, your real position (coordinates and altitude) could be anything point contained into the sphere but your reported GNSS position (coordinates and altitude) always will be the center of the sphere, i.e, the position gived by your GNSS module to your drone flight control board.
Some examples of accuracy (in a 2D view):
@John Hennessy: For now I have implemented this system in five Typhoon H. Main problem is find magnetomoter chips as they are not in stock.
For all:
If you are interested in seeing some flights with this, here you have two flights from 12/30/2017 (yesterday):
First, 078.csv, is using RTK support and was part of a survey mission that I made for a friend.
Second, 079.csv, was a video shooting in same location like before and is not using RTK support.
This Typhoon H unit, the first I bought, has our early ceramic patch antenna design. Currently we are using high grade helical antennas.
As you can see in both .csv files, last column reports GNSS accuracy. Compare both files. After about a minute since press power button, on first flight (with RTK support) accuracy drops below 0.15meters (15cm) and after 3 minutes it achieves 0.05 meters (5cm). This accuracy is the lowest reported by telemetry but this is not maximun accuracy value. As you can see in files, Yuneec telemetry reports GNSS accuracy in blocks of 5cm, for example, from 0.15m drops to 0.10m, then to 0.05m. When I explore raw data extracted from a datalogger attached to the GNSS chip I see the 2.5cm (while yuneec shows in same timestamp 0.05m).
On second flight, without RTK support, accuracy value moves between 1.5 and 1.0 meters.
Original GNSS chip used by Yuneec reports false accuracy values in telemetry because Yuneec has configured it with Airborne Ublox algorithm activated. This is an error. We use pedestrian configuration for lower interpolation in position calcs:
Wish you happy new year!
Regards from Spain,
Dario.
Attachments
- Joined
- Jul 4, 2017
- Messages
- 4,258
- Reaction score
- 2,026
Yes this is old news.
In May 2017, suppliers reported that the company was arrears, but the company said that it was mainly due to the two sides had different opinions on product delivery quality and payment details.[19][20] On the other hand, nearly half of Yuneec's suppliers had not been paid for more than a year. Yuneec has not made supplier payments on time since the second quarter of 2017.[21]
In May 2017, suppliers reported that the company was arrears, but the company said that it was mainly due to the two sides had different opinions on product delivery quality and payment details.[19][20] On the other hand, nearly half of Yuneec's suppliers had not been paid for more than a year. Yuneec has not made supplier payments on time since the second quarter of 2017.[21]
Last edited:
Dario, thanks for posting your historical information. It's great to see that someone can improve an already good flying machine.
I take it that your answer to my question is; yes, 2.5 cm is spherical radius accuracy and, therefore, applies to vertical position as well as horizontal positions.
My telemetry files frequently show GPS accuracy 0.3-0.5m after a few minutes of flight. That's still an order of magnitude less accurate than you are getting with RTK support. Are you saying that GPS accuracy is incorrectly reported by the Yuneec GNSS?
I'm just a recreational user with a mechanical engineering background. So, most of this way over my head. But I appreciate the importance of positional accuracy to safe flying, especially when flying close to immovable objects.
I take it that your answer to my question is; yes, 2.5 cm is spherical radius accuracy and, therefore, applies to vertical position as well as horizontal positions.
My telemetry files frequently show GPS accuracy 0.3-0.5m after a few minutes of flight. That's still an order of magnitude less accurate than you are getting with RTK support. Are you saying that GPS accuracy is incorrectly reported by the Yuneec GNSS?
I'm just a recreational user with a mechanical engineering background. So, most of this way over my head. But I appreciate the importance of positional accuracy to safe flying, especially when flying close to immovable objects.
Last edited:
Information in reference [21] is really serious. It makes me question the near-term as well as long-term viability of Yuneec International. But I'm not anxious to switch allegiance to elephant in the room.Yes this is old news.
In May 2017, suppliers reported that the company was arrears, but the company said that it was mainly due to the two sides had different opinions on product delivery quality and payment details.[19][20] On the other hand, nearly half of Yuneec's suppliers had not been paid for more than a year. Yuneec has not made supplier payments on time since the second quarter of 2017.[21]
John Hennessy
Premium Pilot
- Joined
- Jun 26, 2017
- Messages
- 421
- Reaction score
- 351
- Age
- 69
Hi Dario,
I would like to thank you for your full answers to our questions, and am sorry for interrupting you holiday time by starting this thread over again. But as you can see there are a lot of potential customers here that would like higher accuracy in the 3D sphere as you put it. It is beyond my schooling but can understand where you are coming from. Please keep us in the loop as I for one would love to have one if not 3 of your modules for our working Birds and if they are not too expensive 2 more for our spare machines in emergencies. I look forward to hearing from you in good time when you get back to the lab. I missed all this last night as being on the other side we got NEW YEAR BEFORE YOU OVER THERE.
All's good and look forward to working with you. Johnno Hennessy. (AUSTRALIA).
Keep flying on the green side of the grass .
I would like to thank you for your full answers to our questions, and am sorry for interrupting you holiday time by starting this thread over again. But as you can see there are a lot of potential customers here that would like higher accuracy in the 3D sphere as you put it. It is beyond my schooling but can understand where you are coming from. Please keep us in the loop as I for one would love to have one if not 3 of your modules for our working Birds and if they are not too expensive 2 more for our spare machines in emergencies. I look forward to hearing from you in good time when you get back to the lab. I missed all this last night as being on the other side we got NEW YEAR BEFORE YOU OVER THERE.
All's good and look forward to working with you. Johnno Hennessy. (AUSTRALIA).
Keep flying on the green side of the grass .
There was a link here that was about the Yuneec Layoffs, it has disappeared. I found many other links online including this one. Yuneec USA Inc to lay off staff
Last edited:
Hello everyone,
@Rubik and all of you:
Yes, Yuneec telemetry is reporting wrong values of GNSS accuracy.
It's not that Yuneec is cheating on us. I spent several months investigating this problem. In fact, in my first tests, I could not believe how to a GNSS module of $ 60 could give better results than a $ 300 module. This problem lies in the way in which the original GNSS chip delivers the information to the flight controller. Yuneec uses the GNSS Ublox MAX-M8Q chip in its models, and it is preconfigured for high navigation speeds, i.e, it has enabled "Airborne" dynamics corrections in chip, so the results of position calculations are corrected before they are processed by the flight control board.
Here you have Ublox official datasheet for M8Q serie, look for "Horizontal Position Accuracy":
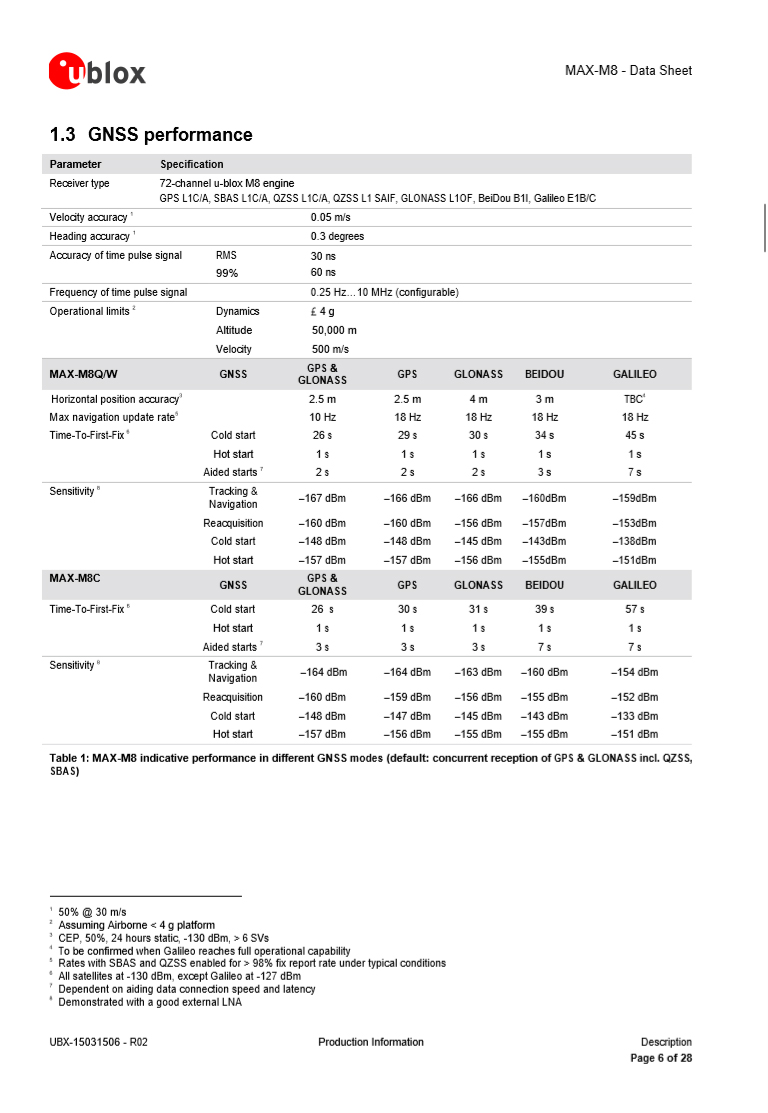
Ask this: How can a chip that officially has a maximun horizontal accuracy of 2.5m give you values under 1m?
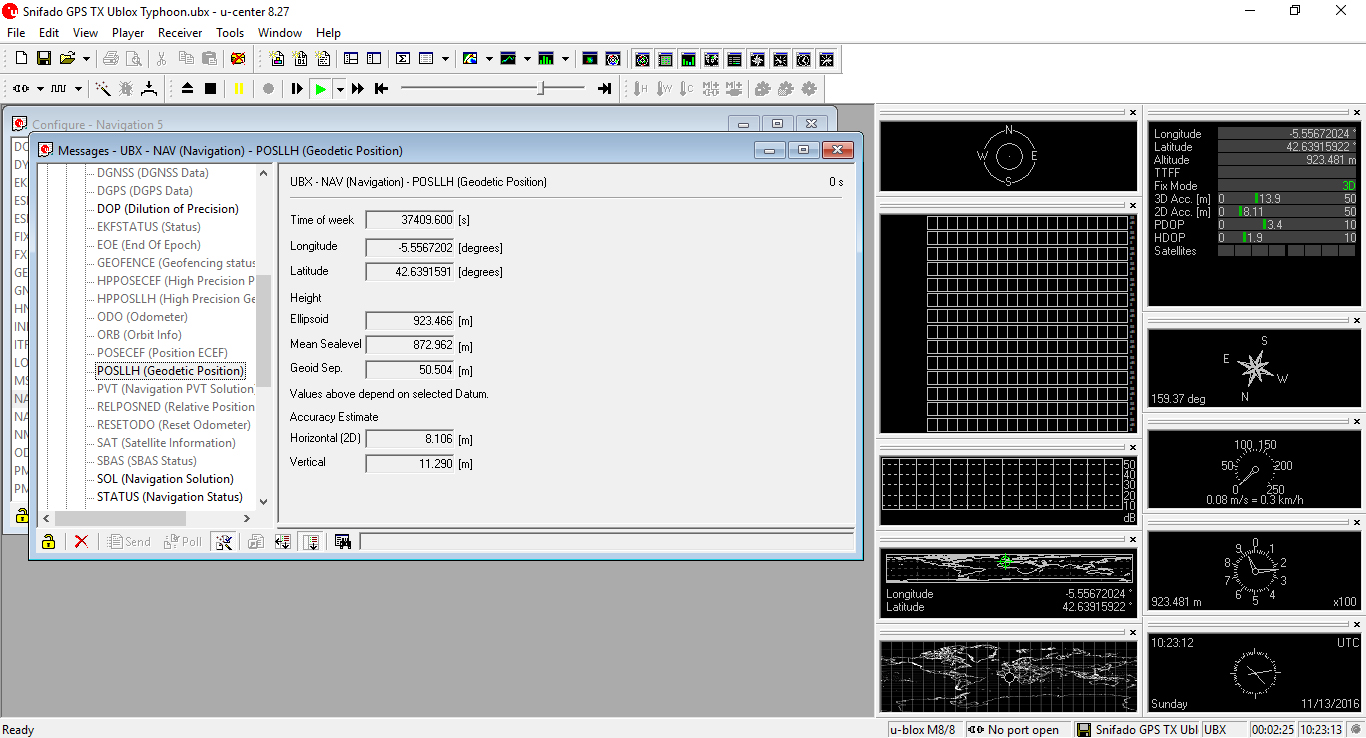
Another image. This is an sniff from original GNSS board of Typhoon H. The difference is that now it is configured as "Stationary", i.e, it do not correct any value as it is placed on the outside without moving. Look for the value "3D acc" at the right upper side of the image and examine the other values at the center of the image. I am sure that the results will surprise you:
In best conditions, for our drone use, M8Q do not get accuracy value below 3m.
And at the end, here you have again the explanation and types of Ublox "dynamic platform" corrections:
Hope this clarify your question.
Regards from Spain,
Dario.
@Rubik and all of you:
Yes, Yuneec telemetry is reporting wrong values of GNSS accuracy.
It's not that Yuneec is cheating on us. I spent several months investigating this problem. In fact, in my first tests, I could not believe how to a GNSS module of $ 60 could give better results than a $ 300 module. This problem lies in the way in which the original GNSS chip delivers the information to the flight controller. Yuneec uses the GNSS Ublox MAX-M8Q chip in its models, and it is preconfigured for high navigation speeds, i.e, it has enabled "Airborne" dynamics corrections in chip, so the results of position calculations are corrected before they are processed by the flight control board.
Here you have Ublox official datasheet for M8Q serie, look for "Horizontal Position Accuracy":
Ask this: How can a chip that officially has a maximun horizontal accuracy of 2.5m give you values under 1m?
Another image. This is an sniff from original GNSS board of Typhoon H. The difference is that now it is configured as "Stationary", i.e, it do not correct any value as it is placed on the outside without moving. Look for the value "3D acc" at the right upper side of the image and examine the other values at the center of the image. I am sure that the results will surprise you:
In best conditions, for our drone use, M8Q do not get accuracy value below 3m.
And at the end, here you have again the explanation and types of Ublox "dynamic platform" corrections:
Hope this clarify your question.
Regards from Spain,
Dario.
Hello everyone,
@Rubik and all of you:
Yes, Yuneec telemetry is reporting wrong values of GNSS accuracy.
It's not that Yuneec is cheating on us. I spent several months investigating this problem. In fact, in my first tests, I could not believe how to a GNSS module of $ 60 could give better results than a $ 300 module. This problem lies in the way in which the original GNSS chip delivers the information to the flight controller. Yuneec uses the GNSS Ublox MAX-M8Q chip in its models, and it is preconfigured for high navigation speeds, i.e, it has enabled "Airborne" dynamics corrections in chip, so the results of position calculations are corrected before they are processed by the flight control board.
Here you have Ublox official datasheet for M8Q serie, look for "Horizontal Position Accuracy":
Ask this: How can a chip that officially has a maximun horizontal accuracy of 2.5m give you values under 1m?
Another image. This is an sniff from original GNSS board of Typhoon H. The difference is that now it is configured as "Stationary", i.e, it do not correct any value as it is placed on the outside without moving. Look for the value "3D acc" at the right upper side of the image and examine the other values at the center of the image. I am sure that the results will surprise you:
In best conditions, for our drone use, M8Q do not get accuracy value below 3m.
And at the end, here you have again the explanation and types of Ublox "dynamic platform" corrections:
Hope this clarify your question.
Regards from Spain,
Dario.
Hi Dario,Hello everyone,
@Rubik and all of you:
Yes, Yuneec telemetry is reporting wrong values of GNSS accuracy.
It's not that Yuneec is cheating on us. I spent several months investigating this problem. In fact, in my first tests, I could not believe how to a GNSS module of $ 60 could give better results than a $ 300 module. This problem lies in the way in which the original GNSS chip delivers the information to the flight controller. Yuneec uses the GNSS Ublox MAX-M8Q chip in its models, and it is preconfigured for high navigation speeds, i.e, it has enabled "Airborne" dynamics corrections in chip, so the results of position calculations are corrected before they are processed by the flight control board.
Here you have Ublox official datasheet for M8Q serie, look for "Horizontal Position Accuracy":
Ask this: How can a chip that officially has a maximun horizontal accuracy of 2.5m give you values under 1m?
Another image. This is an sniff from original GNSS board of Typhoon H. The difference is that now it is configured as "Stationary", i.e, it do not correct any value as it is placed on the outside without moving. Look for the value "3D acc" at the right upper side of the image and examine the other values at the center of the image. I am sure that the results will surprise you:
In best conditions, for our drone use, M8Q do not get accuracy value below 3m.
And at the end, here you have again the explanation and types of Ublox "dynamic platform" corrections:
Hope this clarify your question.
Regards from Spain,
Dario.
Thanks for the information but could you please provide some links to your claim that Yuneec is ceasing production of the Typhoon H please? Can you explain this statement you made also? Thanks.
"it is just a matter of restricted information rights."
Apparently Yuneec makes products for Horizon. I wonder how many products that may be. I guess it is no coincidence that Yuneecs and Horizons warehouses are in Ontario California.
- Status
- Not open for further replies.
