Here we go! The first version of Thunderbird for 2021.
")
As usual, this file is again named with Thunderbird_[date]_CD.zip, where the CD stands for "Crazy Destroyer" (see its origin previously in this thread ;-)) Essentially, the CD means, that it has been tested only by me, so it is possible that there are bugs present. Fly it with your own responsibility - as always.
Speaking of testing:
As seen on file dates, this firmware image was built on 5.4.2021 (in that Finnish town called Kouvola so does it make this the Thunderbird Kouvola Edition?
Or Concrete Edition, as Finns like to mock Kouvola of being full of concrete as .. well, majority of buildings in the small centre of city are
indeed made of it. Except huge old locomotive roundhouses in the centre of the city, which are built of red bricks..
)
... now where were we... Yes, built on 5.4.2021 and has been tested since.
The testing started with manual flights in various modes and involved many restarts and battery connections to see that the problem of race condition in RX handling with spurious arming is gone. Then the flights proceeded into corner cases and failsafe tests, which results I have documented above. The Thunderbird/PX4 -hates- to switch from non-GPS mode to a GPS-assisted one in full speed, marking the GPS faulty for the rest of the flight. This is good to know, if you are doing some high-speed runs or aerobatics, yet still relying the mode switch to save you if things go wrong... don't do it. This is very likely desired behavior of the PX4 - to prevent fly-aways in case of unreliable or erroneus GPS data. As the GNSS (at this context) has absolutely no way of monitoring signal integrity, the PX4 does its own health checks for it.
If the GPS fault occurs due to the above case (or other), the Thunderbird starts something that resembles a fly-away, but stabilizes after few seconds, still drifting away, possibly at a speed. At this point, the GPS failure occurs, ST16 pops up an alarm, and the Thunderbird illuminates the red light on the drone. The drone is now in a mode, where it keeps its altitude, but otherwise is in Stabilize mode - keep flying and recover the drone. Just like regular Typhoon with GPS off. Nothing is broken, the drone is flying OK, just
relax and keep flying it. This may scare you when it first occurs. The GPS will recover either when you take off next time, or restart the drone. However, for this flight, GPS-assisted modes are not available, and this includes the GPS-assisted failsafe. However, regarding the reliability of the GPS on the Typhoon - I have had only
one real in-flight malfunction on my Typhoons and that with the one with stock firmware. No "real" GPS in-flight failure with the Thunderbird, ever.
That actually brings us discussing about the failsafes, which were also very carefully tested. The regular failsafe, if radio signal is lost, brings the drone back where you took off. So select your take-off site carefully, no trees etc. near it. The default parameters supplied, take the drone to 30 meters before returning - all fully configurable for you in QGroundcontrol. If the GPS is malfunctioning (either by your own actions described above, or external interference), the failsafe landing is done without the GPS to the current position of the drone. This was also tested, aborting before touchdown. When doing GPS-less failsafe landing, the drone is not capable of decelerating, and the touchdown will happen at a speed, resulting in damages. But you'll still get it back.
After testing failsafes, I proceeded testing the mission capability. This firmware has flown around 30 missions with 100% success rate (and the previous CD release a lot more). While flying a mission, the radio failsafe will not activate. There are failsafes for battery voltage levels, that abort the mission with return-to-home but
do not rely on these due to differences in batteries, battery calibration and so on
. Keep your eye on the battery level, and abort the mission by yourselves if required. Plan missions carefully, pay special attention to waypoint altitudes.
The battery calibration is done for my own drone only, and you should probably do it for your drone by yourselves, using instructions in PX4's documentation. My calibration values are quite true - when the battery indicator goes yellow, there is very little flight time remaining and if it goes red, depending on the battery and outside temperature, there are seconds remaining. For these unforeseen aspects of the battery behavior, please do not trust the mission battery failsafes configured, or configure them for your drone
very conservatively.
The mode switch has Stabilize mode on top, Position in the middle, and Mission in the lowest position. No RTH is defined in the param file, feel free to alter the switch configuration as you wish.
Please
CALIBRATE the drone before flight and observe compass behavior, verify that the north is where it should be in QGroundcontrol. While the param file supplied in the zip gets you started, you
MUST do the calibrations for your hardware. The Typhoons come with two magnetometers, and there is no way of telling which one you have. They are mounted differently on the GPS board. If north is 90 (or 270 degrees or so) off, you
must change the compass orientation in the QGroundcontrol. Refer h-elsner's documentation in calibrations and compass orientation. If the directions are off, the Thunderbird will start flying in circles violently, resulting in a crash. If you see this happening in GPS-assisted modes, switch back to Stabilize, recover and keep flying. Yet again, its like regular Typhoon without GPS now. Land, change the orientation, calibrate and try again. The Stabilize essentially saves the drone if anything goes wrong. However, that being said, the Thunderbird has never yet failed on me on GPS-assisted modes. But I am telling about these corner cases for you as it is good to know how to react if something goes wrong, especially if you are experimenting with all the possibilities the PX4 offers you. Learn to fly in Stabilize, as that is also the easiest mode that reveals the true thrust-to-weight ratio and flight performance of the Typhoon.
It is essential to do the first flight in the
Stabilize mode. Switch then to Position mode in-flight when there is plenty of room around, while being ready to switch back to Stabilize if issues described above are seen. If everything goes fine, keep flying.
Remember that the Thunderbird is a fork of PX4. (version 1.10.0 to be exact). So all the possibilities and features of the PX4 are there. H-elsner has supplied also a different set of parameters previously in this thread, if you would like to try a slightly differently tuned Thunderbird.
There are known issues, too:
- The green arrow on ST16's screen is
unreliable. The arrow
is there and visible, but please disregard it. I may fix this in the future, but I give no promises on this one.
- Obstacle avoidance unavailable -error message is something that you may see sometimes. Please disregard this one too. This is a telemetry glitch, nothing to worry about. The back button the ST16 disregards it. (However this is partly correct by accident, as the obs. avoidance
is unavailable; I have not implented the sonar there yet)
- 5 motor mode, please land -popup. Again, a telemetry glitch that I got once. At the moment, the Thunderbird does not detect the motor failures, so you can safely discard this and keep flying
- GPS failure popups in ground. You will see these, and these
are real. As discussed above, the PX4 is
very picky about the GPS signal and its precision (amount of satellites being only a part of it), and it is very happy to nag about it, even if you block the reception with your body momentarily. When you get these (you'll likely to receive one after landing too), wait for the GPS reception come back reliable (the green blinking light will go back solid green and the GPS status will go from ACQUIRE to READY) and launch. You will be able to launch in Stabilize with no GPS, overriding any checks, but please remember that the GPS and failsafe return are not available for that flight. Yet again, nothing is broken, the Thunderbird / PX4 just wants to protect the drone ensuring the full operational capability before letting you to take off.
- - - - -
Please read the wonderful documentation by h-elsner, read this thread, see
PX4 User Guide, learn to fly in Stabilize,
have fun, and feel free to explore what the PX4 can provide for you. The PX4 is called "Professional Autopilot" for a reason.
The Crazy Destroyer status of this firmware will go to FT (Flight Tested) once we have enough experience to say so.
This is also when I'll push the source codes to the Github.
One more thing: If you are going to experiment with hardware modifications to the drone, such as different gimbals, cameras, telemetry, 4G/5G control, Raspberry Pi or something requiring UART, PWM, I2C, SPI or something, please tell about those as we have full control over the drone's HW now, and we can probably reassign some pins for UART, PWM or whatever might be needed.
Br,
TR


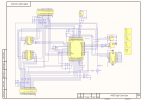
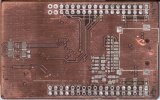
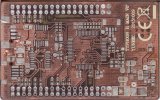
") Decided to join your team. I apologize in advance for my language - it's Google's fault! I have been observing the work of h-elsner for a long time, at a certain stage you helped me a lot. Thanks to colleagues Pöllö and APack for their great work. I have several Yuneec helicopters, and now the old 480 is retired, and now evil experiments can be carried out on him. In fact, some time ago I experimented with a 480 controller and reproduced a complete board with all components. But unfortunately I could not bring the firmware to departure. In the coming days I will try to flash your creation and try to take off! Take me into your ranks.
Decided to join your team. I apologize in advance for my language - it's Google's fault! I have been observing the work of h-elsner for a long time, at a certain stage you helped me a lot. Thanks to colleagues Pöllö and APack for their great work. I have several Yuneec helicopters, and now the old 480 is retired, and now evil experiments can be carried out on him. In fact, some time ago I experimented with a 480 controller and reproduced a complete board with all components. But unfortunately I could not bring the firmware to departure. In the coming days I will try to flash your creation and try to take off! Take me into your ranks.