

Thank you for the explanation. I did go and look at the 00041: data. The little that I understood about the battery level I did see what I guess you called a knee. I really wouldn't know if that's a normal "knee". I'm thinking that you will see "knees" with every battery, but mine must be a bad one. That battery was bought new, as far as I know, on line over a year ago. Its one of those Ultrax batteries. I do know some about battery care so I bought a good charger the "Hitec RCD X2 AC Plus Black Edition Multi-Function AC/DC Charger". I believe my problem may have been that my drone, batteries, GPS battery sat unused for too long. The batteries weren't in a storage charge. I hope that I've learned my lesson. Also, I'm not on-line everyday. So if I don't reply right away (or for a long time, sometimes) its just that life would have gotten in the way. Thanks for the help. other than the battery how did the rest of the 00041 data look?
Another Strobe Mount for attaching to the Rotor Arm
 www.thingiverse.com
www.thingiverse.com
Another Strobe Mount for attaching to the Rotor Arm
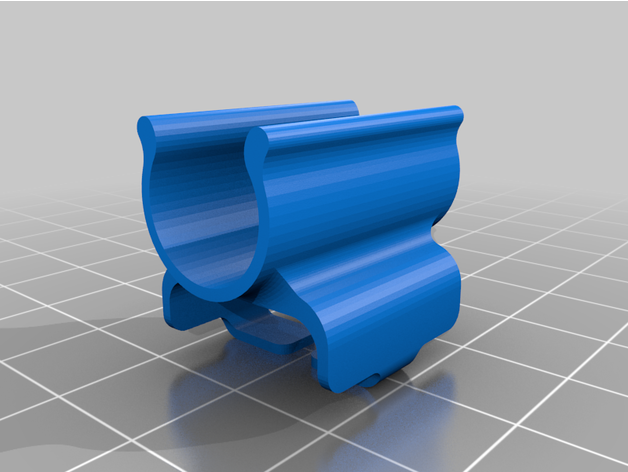
Typhoon H Arm Strobe by psutex
A light weight simple "Firehouse" LED strobe attachment for the Typhoon H Rotor Arm. It attaches to the arm by just just snapping it on. The mount can be located anywhere and at any rotation on the arm. The strobe can be charged without removing from the "H" or the mount.Strobe used:Firehouse...
www.thingiverse.com
Last edited:


